Artificial Intelligence and Autonomous Systems
ISSN: 2959-0744 (Print)
ISSN: 2959-0752 (Online)
CODEN: AIASBB
No items found.
Global confidence degree based graph neural network for financial fraud detection
Received: 12 Mar, 2025
Accepted: 16 Apr, 2025
Published: 25 Apr, 2025
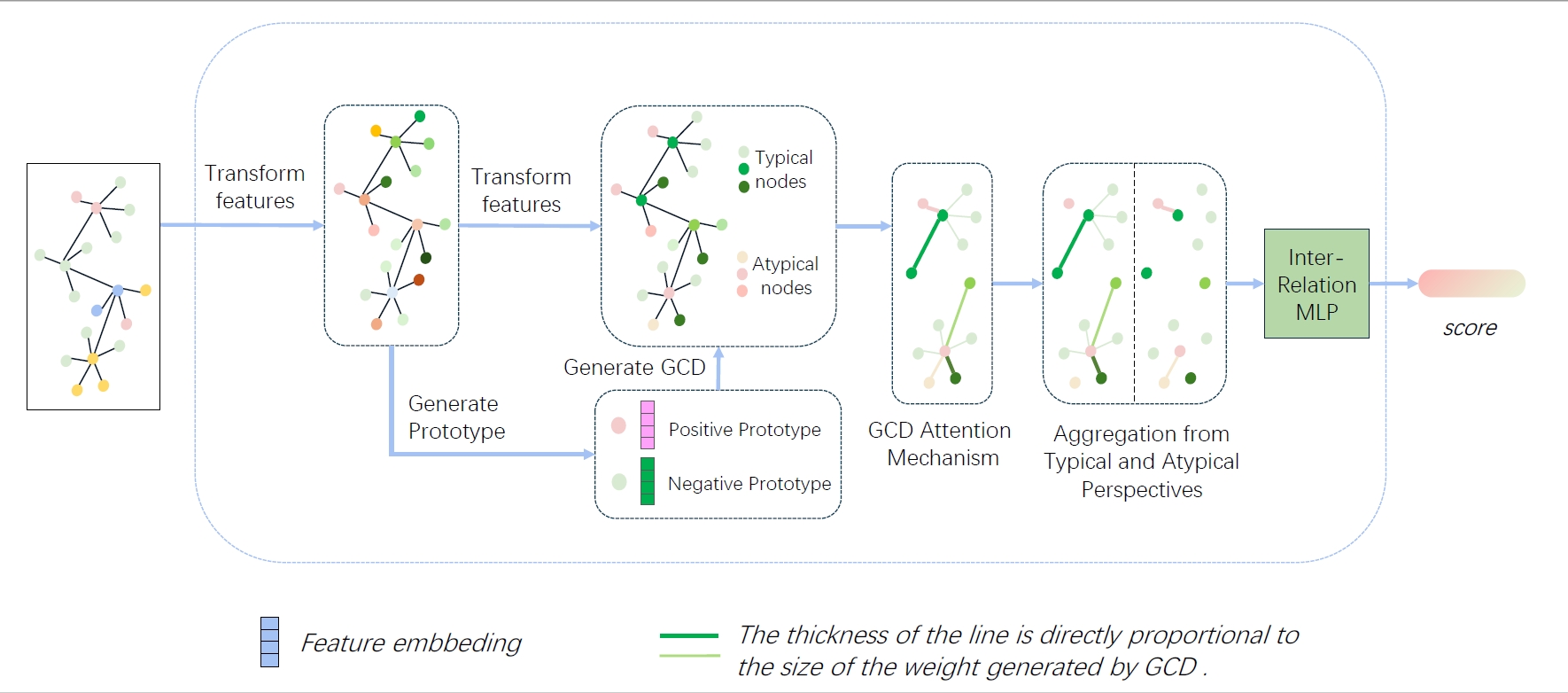
Graph Neural Networks (GNNs) are widely used in financial fraud detection due to their excellent ability on handling graph-structured financial data and modeling multilayer connections by aggregating information of neighbors. However, these GNN-based methods focus on extracting neighbor-level information but neglect a global perspective. This paper presents the concept and calculation formula of Global Confidence Degree (GCD) and thus designs GCD-based GNN (GCD-GNN) that can address the challenges of camouflage in fraudulent activities and thus can capture more global information. To obtain a precise GCD for each node, we use a multilayer perceptron to transform features and then the new features and the corresponding prototype are used to eliminate unnecessary information. The GCD of a node evaluates the typicality of the node and thus we can leverage GCD to generate attention values for message aggregation. This process is carried out through both the original GCD and its inverse, allowing us to capture both the typical neighbors with high GCD and the atypical ones with low GCD. Extensive experiments on two public datasets demonstrate that GCD-GNN outperforms state-of-the-art baselines, highlighting the effectiveness of GCD. We also design a lightweight GCD-GNN (GCD-GNNlight ) that also outperforms the baselines but is slightly weaker than GCD-GNN on fraud detection performance. However, GCD-GNNlight obviously outperforms GCD-GNN on convergence and inference speed.
Cooperative adaptive fault-tolerant control for heterogeneous multiagent systems with guaranteed performance
Received: 15 Apr, 2024
Accepted: 16 Jul, 2024
Published: 06 Aug, 2024
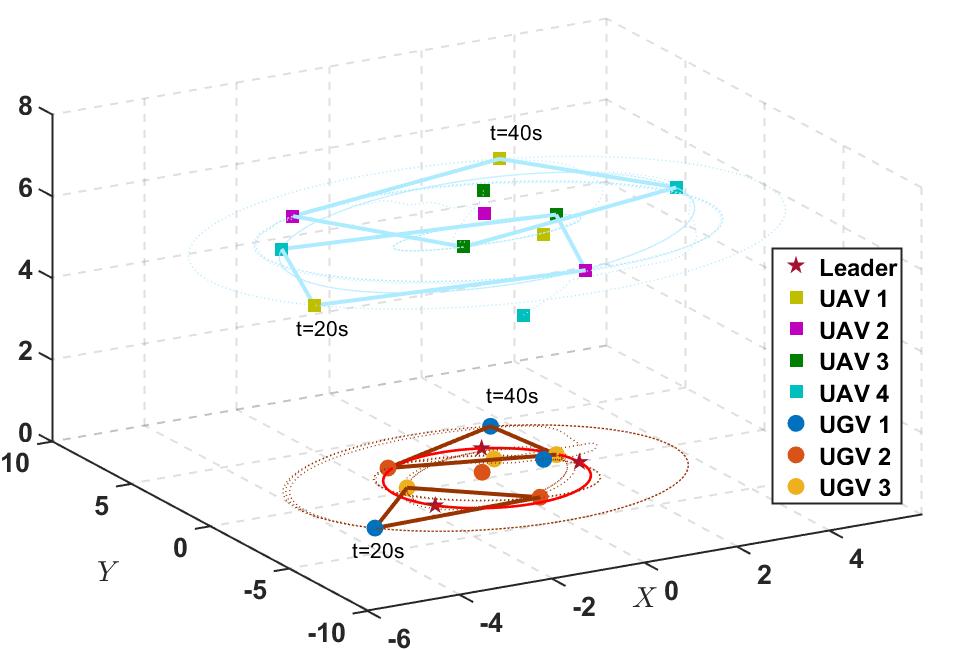
This paper studies the fault-tolerant control problem for the heterogeneous multiagen systems consisting of multiple quadrotors and mobile robots with guaranteed performance in the presence of unknown actuator faults. First, the full-state performance constraints of the position and attitude subsystem of follower vehicles are considered, especially in the case of actuator faults, and then the state constraints of heterogeneous unmanned systems are addressed by combining the performance functions and barrier Lyapunov function method. Then, the constraints-based cooperative adaptive fault-tolerant control strategy is proposed, where the adaptive terms are adopted to compensate for the unknown bounded actuator loss of effectiveness faults and bias faults and the constraint signals are introduced to ensure the performance conditions of system states. Based on the theoretical analysis, the cooperative fault-tolerant time-varying formation convergence performance is discussed. The simulation results on the UAVs-UGVs formation systems composed of quadrotors and mobile robots are presented to validate the effectiveness of the proposed control strategy.
Autonomous and sustainable machine learning: pursuing new horizons of intelligent systems
Received: 19 Feb, 2023
Accepted: 22 Apr, 2023
Published: 10 May, 2023
The paradigm of Artificial Intelligence and Machine Learning has resulted in an amazingly diverse plethora of models operating in various environments and quite often exhibiting numerous successes. There is a growing spectrum of challenging application areas of high criticality where one has to meet a number of fundamental requirements. Those manifest evidently when Machine Learning constructs have to function autonomously and any decisions being rendered entail far reaching implications. The carefully crafted learning process has to result with advanced models. Along with the developed models, they have to come hand-in-hand with credibility measures that are crucial to assess an extent to which the results generated by such measures are meaningful, trustworthy and credible.
The credibility of the Machine Learning models becomes of paramount importance given the nature of application domains. Autonomous systems including autonomous vehicles, user identification (both using audio and video channels), financial systems (calling for sound mechanisms to quantify risk levels) require the ML system making classification or prediction decisions some level of self-awareness. Among others, this translates to forming sound answers to the following crucial questions emerging within the design process:
How much confidence could be associated with the result?
Could any action /decision be taken on a basis of obtained result?
Given the reported level of credibility, is there any other experimental evidence one could acquire to validate the decision?
In this study, we advocate that a general way to achieve such goals is to engage the mechanism of Granular Computing; subsequently, the granularity endowing the results are sought as a vehicle use to quantify the credibility level. Sustainable (or green) Machine Learning gives rise to the agenda of knowledge reuse, namely exploring possibilities of potential reuse of the already designed models in a spectrum of current environments where computing overhead as one of the ways to contribute to the agenda of sustainable Machine Learning and discuss a crucial role of information granularity in this context.
No items found.
No items found.
No items found.