Mechatronics Technology
ISSN: 2959-376X (Print)
ISSN: 2959-3778 (Online)
CODEN: MTEEEV
A cross-modal alignment-based time-series large model for water supply networks flow forecasting
Water supply networks, as critical urban infrastructure, play an essential role in ensuring stable city operations. Accurate flow forecasting is therefore of great significance for optimizing operational scheduling, reducing energy consumption, and maintaining system stability. With the strong capability of large language models (LLM) in sequence modeling and representation learning, their application to time-series forecasting has become an emerging research direction. However, a key challenge lies in the modality gap between numerical time-series data and the semantic embedding space of language models. To address this issue, this paper proposes a cross-modal alignment-based time-series foundation model for forecasting. The proposed method constructs a mapping between time-series features and the semantic embedding space, enabling effective projection of numerical sequences into a semantic domain. Furthermore, a cross-modal alignment mechanism is designed to enhance feature fusion, thereby improving the model’s ability to capture multi-scale periodic patterns, long-term temporal trends, and stochastic demand fluctuations commonly observed in water distribution systems. Experimental results demonstrate that the proposed method consistently outperforms baseline approaches across different prediction horizons in terms of mean absolute error (MAE) and mean squared erro (MSE), verifying the effectiveness and strong generalization capability of the cross-modal alignment strategy in water distribution network flow forecasting.

Reconstruction of helicopter rotor pressure fields using physics-informed neural networks and flexible pressure sensor arrays
To address the challenges of inaccessible pressure data on helicopter blade surfaces and the inability of sparse pressure measurement points to fully characterize the pressure field across the entire blade, this paper proposes a rotor-blade surface pressure reconstruction framework that combines flexible pressure sensing arrays, Kriging-based statistical priors, and physics-informed neural networks (PINNs). First, a scaled rotor experimental platform equipped with a flexible pressure sensor array is developed to acquire full-field reference pressure data under multiple rotational speeds, providing a verifiable benchmark for model training and evaluation. Under sparse sensing conditions, Kriging regression is then used to generate a prior pressure field together with a spatial variance map that quantifies uncertainty in unmeasured regions. Based on this prior, a residual-learning PINN is constructed, in which weak physical constraints are incorporated into the loss function, while the Kriging variance is further used to achieve spatially adaptive weighting between data fidelity and physics regularization. The main contribution of the proposed framework lies in the integration of statistical prior modeling, uncertainty-aware physics coupling, and flexible-array-based experimental benchmarking for rotor-specific pressure reconstruction. Experimental results show that the proposed method achieves accurate full-field reconstruction under sparse measurements, with an overall reconstruction error of approximately 4%, while preserving key pressure features in critical regions such as the leading edge and blade tip. In addition, sensitivity analysis indicates that the leading-edge and tip regions are the most critical to global reconstruction accuracy, providing practical guidance for sensor placement.

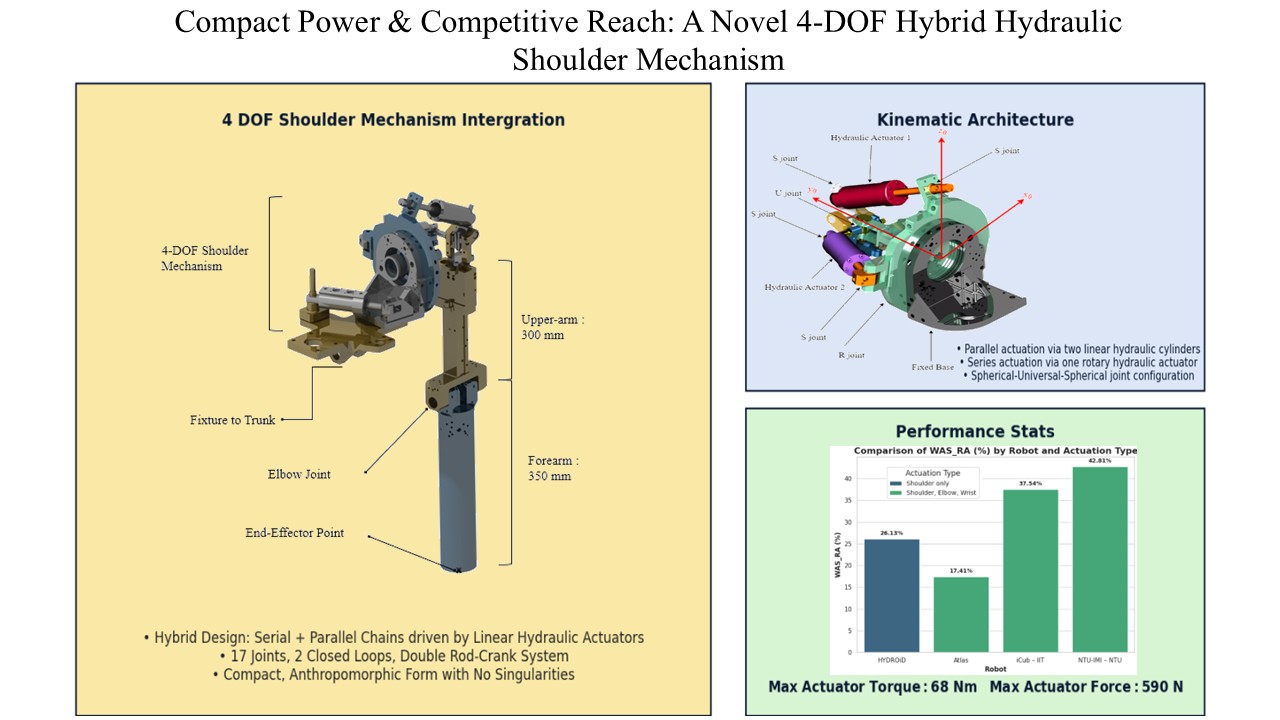
Design of a generic hybrid mechanism for hydraulic actuation in humanoid shoulder joints
This paper introduces a hybrid serial-parallel mechanism developed for the arms of the HYDROïD humanoid robot, aiming to enhance workspace while improving structural stiffness and rigidity. The mechanism is composed of two integrated substructures: a serial chain and a fully parallel subsystem. Although hybrid architectures have been underexplored in humanoid robotics, their combination of serial and parallel advantages presents a promising solution to challenges such as compactness and the varied range of motion required in pitch, yaw, and roll directions. A key design objective is to maintain a slim and anthropomorphic form to facilitate effective and intuitive human-robot interaction. To meet this criterion, the modified Hanavan model was used to determine the geometric and inertial properties of the robot’s upper body, particularly the shoulder mechanism. For initial spatial approximation, the shoulder joint and upper torso were modeled using simplified geometries such as cylindrical cones or bounding parallelepipeds to respect the compact design envelope. These spatial constraints support the use of hybrid architectures over purely parallel configurations. Finally, the kinematic performance of the proposed mechanism is validated through numerical simulations of the workspace and joint torques, demonstrating the feasibility and effectiveness of the hybrid design approach in humanoid robotics.